-
控制理论 编辑
 控制理论
控制理论
控制理论是讲述系统控制科学中具有新观念、新思想的理论研究成果及其在各个领域中,特别是高科技领域中的应用研究成果,但是在民用领域即实际生活中有很严重的脱节。飞行器控制技术的进步是与自动控制理论的发展密切相关的。控制理论在飞行器控制技术方面获得了广泛的应用,取得了许多重要成果。
中文名:控制理论
外文名:control theory
相关理论:自动控制理论
应用:飞行器控制技术
经典控制理论
经典控制理论即古典控制理论,也称为自动控制理论。
20世纪初研制成装在飞机上的电动陀螺稳定装置,并发展成自动驾驶仪,但这仅仅是人们在实践中直观摸索的结果,尚无理论上的指导。当时的自动驾驶仪在结构上比较简陋,对飞机的稳定和控制也极为简单,控制质量不高。30年代末至40年代初形成经典控制理论。在这种理论指导下飞机上自动驾驶仪的性能得到提高,并在40年代为研制V-1、V-2导弹提供了基础。经典控制理论适用于单输入、单输出的线性定常(参数不随时间而变)系统,所以在分析设计V-1、V-2导弹控制系统时,将导弹的运动分解成单输入、单输出的运动。V-2导弹从地面飞出大气层,其特性参数变化很大,是一个时变对象,但为了应用经典控制理论而采用系数冻结法将时变对象简化为定常的对象。这样,V-1和V-2导弹虽都投入使用,但命中精度不高。经典控制理论中的非线性理论在40~50年代得到发展,经典的分析方法有描述函数法、相平面法等。这些分析方法在分析战术导弹制导系统(较多采用典型非线性的继电控制方式)时较为有效,成为50年代战术导弹得到较大发展的因素之一。
随着导弹和航天活动的进展,对飞行器控制的精度要求大大提高,飞行器完成的任务更趋复杂,加上飞行器飞行时环境的急剧变化,对飞行器控制系统提出了更高的要求。为了满足这些要求,必须寻求新的理论来指导控制系统的设计。
经典控制理论的发展历程
1.、萌芽阶段
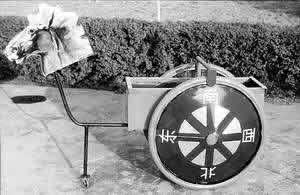
指南车
早在古代,劳动人民就凭借生产实践中积累的丰富经验和对反馈概念的直观认识,发明了许多闪烁控制理论智慧火花的杰作。如果要追溯自动控制技术的发展历史早在两千年前中国就有了自动控制技术的萌芽。例如,两千年前我国发明的指南车,就是一种开环自动调节系统。它利用差速齿轮原理,利用齿轮传动系统,根据车轮的转动,由车上木人指示方向。不论车子转向何方,木人的手始终指向南方,“车虽回运而手常指南”。·我国北宋时代(公元1086~1089年)苏颂和韩公廉利用天衡装置制造的水运仪象台,就是一个按负反馈原理构成的闭环非线性自动控制系统 。上层是一个露天的平台,设有浑仪一座,用龙柱支持,下面有水槽以定水平。
中层是一间没有窗户的密室,里面放置浑象。天球的一半隐没在地平之下,另一半露在地平的上面,靠机轮带动旋转,一昼夜转动一圈,真实地再现了星辰的起落等天象的变化。 下层包括报时装置和全台的动力机构等。
2.、起步阶段
随着科学技术与工业生产的发展,到十七、十八世纪自动控制技术逐渐应用到现代工业中。1681年法国物理学家、发明家巴本
20世纪50年代中期,科学技术及生产力的发展,特别是空间技术的发展,迫切要求解决更复杂的多变量系统、非线性系统的最优控制问题(例如火箭和宇航器的导航、跟踪和着陆过程中的高精度、低消耗控制,到达目标的控制时间最小等)。实践的需求推动了控制理论的进步,同时,计算机技术的发展也从计算手段上为控制理论的发展提供了条件,适合于描述航天器的运动规律,又便于计算机求解的状态空间模型成为主要的模型形式。俄国数学家李雅普诺夫1892年创立的稳定性理论被引入到控制中。1956年,美国数学家贝尔曼(R. Bellman)提出了离散多阶段决策的最优性原理,创立了动态规划。 之后,贝尔曼等人提出了状态分析法;并于1964年将离散多阶段决策的动态规划法解决了连续动态系统的最优控制问题。美国数学家卡尔曼(R. Kalman)等人于1959年提出了著名的卡尔曼滤波器,1960年又在控制系统的研究中成功地应用了状态空间法,提出系统的能控性和能观测性问题。1956年,前苏联科学家庞特里亚金(L.S. Pontryagin)提出极大值原理,并于1961年证明并发表了极大值原理。极大值原理和动态规划为解决最优控制问题提供了理论工具。
到1960年代初,一套以状态方程作为描述系统的数学模型,以最优控制和卡尔曼滤波为核心的控制系统分析、设计的新原理和方法基本确定,现代控制理论应运而生。进入20世纪60年代,英国控制理论学者罗森布洛克(H.H. Rosenbrock)、欧文斯(D.H. Owens)和麦克法轮(G.J. MacFarlane)研究了使用于计算机辅助控制系统设计的现代频域法理论,将经典控制理论传递函数的概念推广到多变量系统,并探讨了传递函数矩阵与状态方程之间的等价转换关系,为进一步建立统一的线性系统理论奠定了基础。
20世纪70年代瑞典控制理论学者奥斯特隆姆(K.J. Astrom)和法国控制理论学者朗道(L.D. Landau)在自适应控制理论和应用方面作出了贡献。与此同时,关于系统辨识、最优控制、离散时间系统和自适应控制的发展大大丰富了现代控制理论的内容。现代控制理论主要利用计算机作为系统建模分析、设计乃至控制的手段,适用于多变量、非线性、时变系统。 它在本质上是一种“时域法”但并不是对经典频域法的从频率域回到时间域的简单再回归,而是立足于新的分析方法,有着新的目标的新理论。现代控制理论研究内容非常广泛,主要包括三个基本内容:多变量线性系统理论、最优控制理论以及最优估计与系统辨识理论。从理论上解决了系统的能控性、能观测性、稳定性以及许多复杂系统的控制问题。
2、利用时间域法容易给人以时间上的清晰性能指标,如最快、最小能量等,易于理解接受和优化设计。
3、易于考虑系统的初始条件,使得所设计的控制系统有更高的精度和更佳的性能品质指标。
4、易于用计算机进行系统分析计算和实现计算机控制,显示了所设计的控制系统的实现具有极大的可行性、优越性、先进性。
智能控制理论研究与应用:在对模糊控制、神经网络、专家系统和遗传算法等理论进行分析和研究的基础上,重点研究多种智能方法综合应用的集成智能控制算法。
计算机控制系统:针对不同的生产过程和控制对象,研究采用DCS、PLC、工业控制计算机等控制设备,构成低成本、高性能、多功能的计算机控制系统。
网络控制理论及其应用:通过对网络拓扑结构及网络环境下先进控制理论与方法的研究,充分利用网络资源,实现从决策到控制的全过程优化。
1、本站所有文本、信息、视频文件等,仅代表本站观点或作者本人观点,请网友谨慎参考使用。
2、本站信息均为作者提供和网友推荐收集整理而来,仅供学习和研究使用。
3、对任何由于使用本站内容而引起的诉讼、纠纷,本站不承担任何责任。
4、如有侵犯你版权的,请来信(邮箱:baike52199@gmail.com)指出,核实后,本站将立即删除。